Deep Learning
Overview
Compared with traditional machine learning
- The old problem with neural network is scalability.

- Traditional:
- Sensor :arrow_right: Feature Representation:arrow_right: Learning algorithm
- Images contains just too many features for methods like Logistics Regression
- Hand-tuned features
- A feature extraction methods cannot be generalized to other domains: CV features are only useful for CV tasks
- Deep Learning:
- Sensor :arrow_right: Learning algorithm
- Modelling directly on the raw data from the sensor
- We can see all the hidden layers as a magic function that map all features into a space where we can simply do linear classification
NN Compared with Boosting
- Both combing the results of many sub-classifier / sub-node.
- Boosting trains many sub-classifier consequently while NN trains them simultaneously.
- All sub nodes are at the same layers in Boosting (only linear combination), but for NN the can be stacked upon one another.
Recent development
Take off: Alex Net
Image classification problem with 1000 categories: Alex Net improved the error rate from 26% to 15%.
Build blocks of Neural Network
SoftMax: from multinomial logistic regression
- $M$ classes to predict, $p$ dimensional features: Parameter matrix $W_{M\times p}$
-
Class specific bias vector $b_{M\times 1}$
- In two-classes classification, we get rid of parameters for one class because $P(A)=1-P(B)$
Multinomial logistic regression as “NN”
- Input data vector
- Probability vector: $\hat{h}_k$ (probability for class $k$)
- Output layer: give a prediction randomly based on the probabilities.
Basic neural network: layers & activation function
- If all layers are linear transformation, the results would be the same as that of single layer. (it’s just linear combination of $X$)
- Activation function: non-linearization
- i.e. sigmoid function
- Only the last layer uses SoftMax
Convolutional neural networks
Why CNN?
- A drawback when we use fully-connected network for images:
- We lost the spatial information when vectorizing the whole image
How CNN structures?
- Each layer: a few layers of filters 每个filter提取该层的某些特征
-
Each filter: some structural information?
- At last we vectorize a cube and do fully-connected layer
issues
- :question: In each filter, hotspots corresponds to different directions?
- Slides 3-25 p37, video 3/30 28:47
- :question: why after filtering it’s still $28\times 28$ (p39)
Filter (卷积核)
- 传统CV的角度:每个filter是某种图像模式,filter的结果是input某个局部的图像跟模式模板匹配的相似度。卷积运算
- 神经网络的角度:每个filter是一个参数矩阵,同个layer的不同filter学习不同的特征。
Pooling (池化)
- 用途:减少数据量
-
Skipping stride (subsampling) / Max-pooling
- :grey_question: subsampling vs. dropout
- dropout is for some iteration we don’t use some values
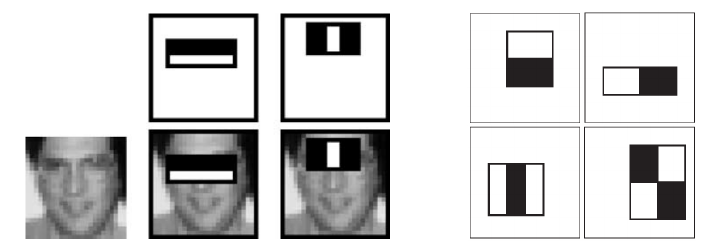
i.e. Face detection
- It scans every sub-images (the picture below is already a sub-image) and detect if there’s a face here.
- The filters are like one-layer convolution.
Relation to Boosting?
- Some pre-defined filter (each for as one decision stump)
- As shown below, one filter activates when matching eye brows darker than eyes and another when the bright parts between two brows.
- Boosting is easier to build into hardware.
Other DL frameworks
● Autoencoders (AE) – unsupervised learning, representation learning ● Generative adversarial networks (GAN) – try to “fool” a computer into thinking generated data is real ● Recurrent neural networks (RNN) – sequential data, especially language modeling
Issues
Overfitting
- Early stopping: stop the iteration when we observe a turn (errors go back up) on the test set.